





TUAKA® - Präzisionsaktuator (Active + Servo)
Aktuator bestehend aus Servomotor und optionalem Encoder
TUAKA® Active bietet einen vollumfänglichen Aktuator bestehend aus Getriebe und Motor
TUAKA® Servo komplettiert Active um einen zusätzlichen Encoder.
Hierbei kann zwischen einer Auswahl an Encodern gewählt werden. Angeboten werden EnDat 2,2 und Hiperface®.
- 3 Baugrößen
- Hohe Steifigkeit
- Lost Motion 1,0 arcmin
- Übertragungsfehler 0,75 arcmin
- Maximale Abtriebsdrehzahl bis 123 U/min
- Versorgungsspannung 48 V
| Kein mechanisches Verdrehspiel | ||
| Lost Motion | < 1 arcmin | |
| Baugrößen | 3 | |
| Untersetzungsverhältnisse | 50:1 80:1 100:1 | |
| Nennabtriebsdrehmoment | 21 - 67 Nm (bei n1 = 2.000 U/min) | |
| Peak Abtriebsdrehmoment | 44 - 157 Nm | |
| Max. Abtriebsdrehzahl | Bis zu 123 U/min | |
| Nennleistunsgaufnahme | Bis zu 391 W | |
| Max. Leistungsaufnahme | Bis zu 1453 W | |
| Versorgungsspannung | 48 V | |
| Encoder Kommunikation | SERVO (RLS): BiSS, RS422 (UART), SPI, SSI, PWM [nicht empfohlen]] SERVO (Heidenhain): EnDat 2,2 SERVO (SICK): Hiperface® DRIVE: integriert (BiSS-C) |
|



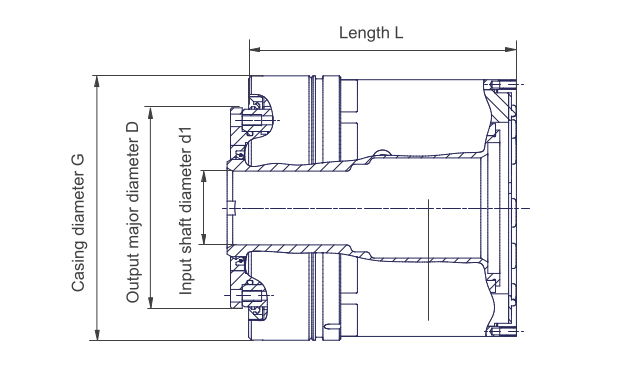
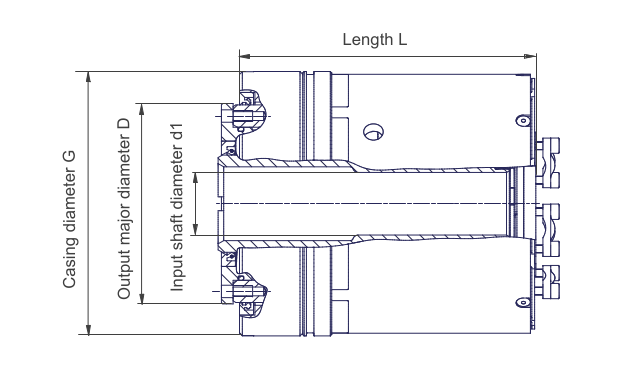
Hauptabmessungen und Gewicht
Hauptabmessungen und Gewicht ACTIVE (Getriebe, Motor)
| Größe | Länge L [mm] | Durchmesser G [mm] | Durchmesser D [mm] | Durchmesser d1 [mm] | Gewicht [kg] |
|---|---|---|---|---|---|
| 103 | 58,9 | 74 h7 | 54 h7 | Max. 26,5 | 1.050 |
| 107 | 78,1 | 95 h7 | 72 h7 | Max. 19,5 | 2.400 |
Hauptabmessungen und Gewicht SERVO (Getriebe, Motor, Encoder)
| Größe | Länge L [mm] | Durchmesser G [mm] | Durchmesser D [mm] | Durchmesser d1 [mm] | Gewicht [kg] |
|---|---|---|---|---|---|
| 103 | Max. 79,9 | 74 h7 | 54 h7 | Max. 26,5 | 1.470 |
| 107 | Max. 100,6 | 95 h7 | 72 h7 | Max. 19,5 | 2.995 |
Durchmesser G = Gehäusedurchmesser
Durchmesser D = Abtrieb Hauptdurchmesser
Durchmesser d1 = Antriebswellendurchmesser
Hauptdaten Drehmoment und Drehzahl
| Größe | Nennabtriebsdrehmoment (1) [Nm] | Peak Abtriebsmoment [Nm] | Max. Abtriebsdrehzahl [U/min] |
|---|---|---|---|
| 103 | Max. 31 | Max. 70 | Max. 123 |
| 107 | Max. 67 | Max 157 | Max. 56 |
(1) bei Antriebsdrehzahl n1 = 2000 U/min
Abtriebslagerkapazität
| Größe | Max. zulässige Axiallast Druck/Zug [N] |
|---|---|
| 103 | 1.590 |
| 107 | 3.000 |
Verfügbare Übersetzungen
| Größe | Übersetzungen |
|---|---|
| 103 | 50 / 80 / 100 |
| 107 | 50 / 80 / 100 |